MEMS-Based Storage: Extended Overview
by David Nagle
(reprinted from the PDL Packet,
Fall 2000)
Imagine a world where gigabytes of storage, 1,000s of MIPS, and gigabit/second networking are merged into a single chip smaller than a quarter. This is the vision of CMU's Center for Highly Integrated Information Processing and Storage Systems (CHIPS). CHIPS' goal is to revolutionize systems, creating low-cost embedded computers with multiple gigabytes of IC-based mass storage that will become a ubiquitous part of our everyday environment. IC-based mass storage devices will also enhance the security and archivability of data storage systems by enabling a tightly integrated coupling of storage and processing. Desktop and laptop computers architectures will evolve to incorporate IC-based mass storage into their memory hierarchies and exploit order-of-magnitude access times reduction, resulting in significant performance improvements. Even the capabilities of massively parallel computers will be enhanced under this vision as the small size of mass storage brings it closer to the processor, enabling dramatic performance improvements on applications ranging from data mining to fast FFTs.
The key to a true system-on-a-chip is the integration of gigabytes
of non-volatile memory on a chip. To solve this problem, CMU researchers
have turned to hybrid approaches that leverage the best of semiconductor
memories and disk drives (IBM and HP have adopted similar approaches).
From semiconductor memories, we adopt the wafer fabrication process
to minimize unit costs. From disk drives, we adopt recording heads that
use mechanical position to address data stored in a thin film material.
For compatibility with silicon fabrication processes, we abandon the
rotating disk paradigm in favor of using simple microelectromechanical
systems (MEMS) to position probe tips over the storage media.
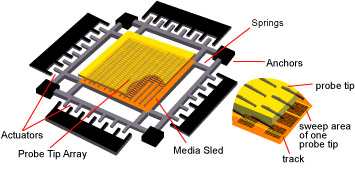
Figure 1: Prototype MEMS-based data storage system.
Figure 1 depicts CMU's prototype MEMS-based data storage system. Similar to disk drives, the device has recording heads and a recording media surface that moves. However, the recording heads are actually MEMS probe tips that are fabricated in a parallel wafer-level manufacturing process. The CMU prototype employs magnetic storage media much like that used by disk drives, but the media surface does not rotate; instead it translates in the X and Y directions to seek to the appropriate data. Data access is accomplished by moving the media at a constant velocity in the Y direction while data is read or written by the stationary probe tips. This design avoids problems with stiction that occur in rotating bearings at very small geometries. This is critical as stiction problems can prevent precise nanometer position control because elements tend to move by alternatively sticking and slipping. This design also avoids the potential wear (to date, MEMS bearings have tended to have quite short lifetimes) that arises when micromechanical surfaces come into contact. The media for the CMU prototype is deposited on a large (8mm x 8mm x 500µm) square plate (the "media sled") and is held above the probe tip array by a network of springs. A force is applied to the sled using electrostatic actuators, though in principle electromagnetic or thermal actuators could be used. Unfortunately, such reciprocating motion is usually limited to a small fraction of the size of the structure. With typical motions being 10% or less of the suspension/actuator length, a single probe tip only "sweeps" 1% of the media sled. However, by using a large array of probe tips, all of the media area can be addressed as long as the media sled moves in X and Y by the pitch of the probe tip array. A large array of probe tips also provides a significant increase in data rate and reliability for the overall system.
Because the media surface is not perfectly flat and individual probe tip heights can vary across the probe-tip array due to both manufacturing variations and curvature of the media sled, nearly all MEMS-based storage approaches incorporate some form of tip height control. CMU's prototype provides for independent active control of the Z motion at every probe tip. Individual probe tips are placed on cantilevers that are electrostatically actuated to a fixed distance from the media surface using a local Z-positioning feedback loop.
Wiring the MEMS-based storage system's 6,400 probe tips' servo and channel electronics requires the electronics to be integrated directly into the same die as the probe tips. This integration greatly improves the bandwidth and sensitivity of the capacitive sensors that are integrated into the probe tips to determine their Z positions relative to the media. To achieve a highly integrated CMOS+MEMS process, we have developed a series of post-processing steps following a standard CMOS fabrication that turns conventional interconnect into released movable mechanical structure. Further, extensions to this integrated CMOS+MEMS process are being developed to fabricate the read/write probe heads. Further, best use of the media requires that the media sled move by at least the probe tip actuator pitch in X and Y. The target is a probe tip array with 100µm centers in X and Y; hence, the media actuator must move at least 50µm.
Of course, the ultimate success of MEMS-based data storage depends on its price and the performance gains in terms of speed, power, or robustness that it offers. Our simulation results show MEMS-based storage devices decrease average I/O service time an order-of-magnitude over disk drives (0.52 ms vs. 10.1 ms). This translates into large reductions in application I/O stall time (e.g., 0.3 sec. vs. 22.3 sec. on TPC-D #6). Moreover, MEMS-based storage's ability to rapidly power-down and its lower data-access power consumption creates an order-of-magnitude decrease in power consumption over a modern low-power disk drive (e.g., 350 joules vs. 6000 joules for Netscape).
Given these performance improvements, there are many opportunities for MEMS devices in the storage hierarchy. Besides replacing disks, MEMS-based storage devices could serve as a non-volatile disk cache, absorbing write traffic at a much greater speed than conventional disk drives. Further, the cache could be explicitly exposed to and managed by software, allowing software to make customized allocation decisions based on the performance needs and access patterns of various data objects, such as metadata, small files, and files with real-time constraints (e.g., video).
For many "portable" applications such as notebook PCs, PDAs, and video camcorders, MEMS-based storage provides a more robust and lower-power solution. Unlike rotating storage, which cannot cope with device rotation (e.g., rapidly turning a PDA) and is very sensitive to shock (e.g., dropping a device), MEMS-based storage is much more immune to gyroscopic effects and can absorb much greater external forces. Further, MEMS-based storage creates a new low-cost entry point for modest-capacity applications in the 1-10 GB range. This is because disks' assemblies of mechanical components keep manufacturing costs from falling below a certain point, while MEMS-based storage rides the linear decline in IC manufacturing costs. With new applications aggressively creating massive amounts of data, we are also exploring how MEMS-based data storage devices can help solve data archival problems, including capacity, time to access data, and long-term data retrieval. For example, medical imaging generates gigabytes of data per patient, which, for cost reasons, is usually stored directly on tape. Write-once MEMS devices provides an attractive alternative to tape. With areal densities 10X greater than high-capacity tape, it should be cost-effective to build storage "bricks" that hold 1000s of MEMS devices. Each brick would hold petabytes of data that could be accessed in under 1 second. Further, by incorporating logic into the MEMS-based storage device, it would be possible to process data directly within the storage brick. With massive numbers of storage bricks there is massive computational parallelism available, creating the ultimate active disk.
Another application domain for MEMS-based storage is bulk non-volatile storage for embedded computers. Single-chip "throw-away" devices that store very large datasets can be built for such applications as civil infrastructure monitoring (e.g., bridges, walls, roadways), weather or seismic tracking, and medical applications. For example, one forthcoming application is temporary storage for microsatellites in very low earth orbit. Given that a satellite in a very low orbit moves very quickly, communications are only possible in very short bursts. Therefore, a low-volume, high-capacity, non-volatile storage device is required to buffer data. MEMS-based storage devices could also add huge databases to single-chip continuous speech recognition systems and be integrated into low-cost consumer or mobile devices. Such chips could be completely self-contained, with hundreds of megabytes of speech data, custom recognition hardware, and only minimal connections for power and I/O.
Further detailed discussion of MEMS-based Storage Device may be found in our list of publications.